

The core idea in this project is to capture the shape of physical objects in real time, with guaranteed precision, and to reconstruct the shape boundaries with minimal geometry. An example application is to let untrained users acquire shapes using emerging mobile sensing devices such as Google’s Project Tango. The user moves the sensor around the object, guided by immediate visual feedback on the input sampling quality. The output is a topologically clean mesh consisting of just the vertices required to represent its features to the desired approximation. The real-time reconstruction enables numerous geometry-processing applications to be taken online, such as shape retrieval/matching, harvesting real-world geometry into a cloud, perspective photo correction, interactive modeling, augmented reality, physics simulation, or fabrication.
Funding
- FWF P24600-N23
Team
Research Areas
 Uses concepts from applied mathematics and computer science to design efficient algorithms for the reconstruction, analysis, manipulation, simulation and transmission of complex 3D models. Example applications are collision detection, reconstruction, compression, occlusion-aware surface handling and improved sampling conditions.
Uses concepts from applied mathematics and computer science to design efficient algorithms for the reconstruction, analysis, manipulation, simulation and transmission of complex 3D models. Example applications are collision detection, reconstruction, compression, occlusion-aware surface handling and improved sampling conditions.


 paper
paper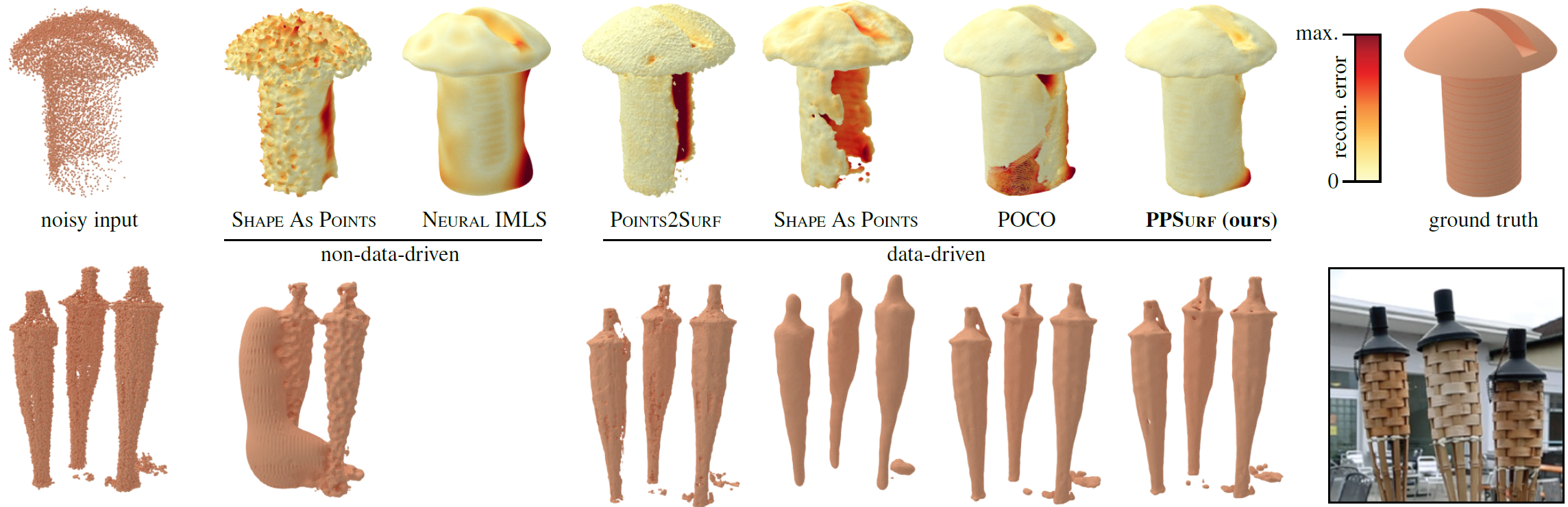 teaser
teaser
 paper
paper
 points2surf_paper
points2surf_paper short video
short video
 paper
paper
 image
image paper
paper
 image
image thesis
thesis
 thesis
thesis
 thesis
thesis
 paper
paper
 image
image thesis
thesis
 paper
paper
 paper
paper slides
slides