

Thomas Köppel
Extracting Noise Models – considering X / Y and Z Noise
[ thesis]
thesis]
Information
- Publication Type: Bachelor Thesis
- Workgroup(s)/Project(s):
- Date: August 2017
- Date (Start): 17. June 2016
- Date (End): 28. August 2017
- Matrikelnummer: 01327052
- Note: 1
- First Supervisor: Stefan Ohrhallinger

- Second Supervisor: Michael Wimmer
- Keywords: noise model, surface reconstruction, sensor noise
Abstract
We have developed two different test setups allowing the characterization of noise in X, Y and Z direction for the KinectV2 and the Phab2Pro depth sensors. We have combined these two methods, generating a single noise model allowing a prediction of the amount of noise in specific areas of an image in the three respective directions at a certain distance and rotation. We have conducted two test setups and measured the noise from 900 mm to 3.100 mm for the generation of the noise models. The test setup of this thesis focused on determining the noise in X, Y and Z direction, covering the whole frustum of the respective depth sensor. In this thesis, Z noise was measured against a wall and X and Y noises were measured using a 3D chequerboard that was shifted through the room, allowing the above mentioned coverage of the whole frustum. Along the edges of the cells of the chequerboard, the X and Y noise was measured. The combined model was evaluated by using a solid cube to classify the quality of our noise model.Additional Files and Images
Additional images and videos
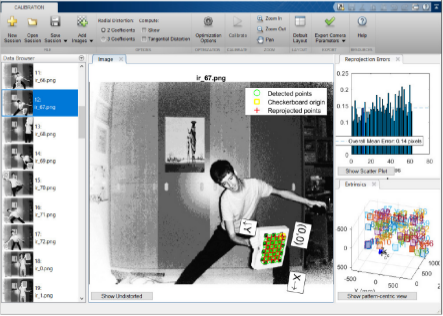
image:
Camera calibration prior to extraction of depth values
Additional files
 thesis:
Bachelor thesis
thesis:
Bachelor thesis
Weblinks
No further information available.BibTeX
@bachelorsthesis{koeppel-2016-baa,
title = "Extracting Noise Models – considering X / Y and Z Noise",
author = "Thomas K\"{o}ppel",
year = "2017",
abstract = "We have developed two different test setups allowing the
characterization of noise in X, Y and Z direction for the
KinectV2 and the Phab2Pro depth sensors. We have combined
these two methods, generating a single noise model allowing
a prediction of the amount of noise in specific areas of an
image in the three respective directions at a certain
distance and rotation. We have conducted two test setups and
measured the noise from 900 mm to 3.100 mm for the
generation of the noise models. The test setup of this
thesis focused on determining the noise in X, Y and Z
direction, covering the whole frustum of the respective
depth sensor. In this thesis, Z noise was measured against a
wall and X and Y noises were measured using a 3D
chequerboard that was shifted through the room, allowing the
above mentioned coverage of the whole frustum. Along the
edges of the cells of the chequerboard, the X and Y noise
was measured. The combined model was evaluated by using a
solid cube to classify the quality of our noise model.",
month = aug,
note = "1",
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Institute of Computer Graphics and Algorithms, Vienna
University of Technology ",
keywords = "noise model, surface reconstruction, sensor noise",
URL = "https://www.cg.tuwien.ac.at/research/publications/2017/koeppel-2016-baa/",
}