

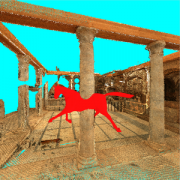
Vision: reconstruct a model of the world that permits online level-of-detail extraction. The core idea in this project is to interactively integrate sensed 3D data of varying sources and scales into a topologically clean surface. Our varying-scale model then permits online extraction of seamless levels of detail for rendering with minimal aliasing and popping artifacts. For this, we develop new topological guarantees to minimize the needed geometry. By exploiting the inherent redundancy of 2D surfaces in 3D, we design a fast way to robustly detect changes that let users better control the scan acquisition process. The topologically clean output surface and the change detection permit easy processing of the geometry for common use cases such as autonomous navigation, environment learning, augmented reality displays of georeferenced semantic information. An example application is fusing and distributing scans from the built-in sensors of multiple autonomous vehicles (ground, air), for incidental map updating as well as guaranteed efficient collision detection and tracking changes for path planning.
Funding
- WWTF Wiener Wissenschafts-, Forschungs- und Technologiefonds ICT19-009
Team
Research Areas
 Uses concepts from applied mathematics and computer science to design efficient algorithms for the reconstruction, analysis, manipulation, simulation and transmission of complex 3D models. Example applications are collision detection, reconstruction, compression, occlusion-aware surface handling and improved sampling conditions.
Uses concepts from applied mathematics and computer science to design efficient algorithms for the reconstruction, analysis, manipulation, simulation and transmission of complex 3D models. Example applications are collision detection, reconstruction, compression, occlusion-aware surface handling and improved sampling conditions.
Publications
| Image | Bib Reference | Publication Type |
|---|---|---|
| 2026 | ||
 |
Levente Slajcho CycleSafely - record depth images [  thesis] thesis] |
Bachelor Thesis |
 |
Bernhard Bayer CycleSafely Mobile [  thesis] thesis] |
Bachelor Thesis |
Diana Marin , Filip Ilic, Stefan Ohrhallinger, Michael Wimmer , Filip Ilic, Stefan Ohrhallinger, Michael WimmerSIGnificant Outlier Removal In Computer Vision, Imaging and Computer Graphics Theory and Applications : 19th International Joint Conference, VISIGRAPP 2024, Rome, Italy, February 27–29, 2024, Revised Selected Papers, pages 67-80. February 2026. |
Conference Paper | |
 |
Nikolas Kaipel Noisy Change Detection [  thesis] thesis] |
Bachelor Thesis |
| 2025 | ||
 |
Florian Miklautsch First-time Localization of Scans [  thesis] thesis] |
Bachelor Thesis |
 |
Armin Kazda Design and Implementation of an AI-Based Edge Device for Automated Traffic Counting [  thesis] thesis] |
Bachelor Thesis |
 |
Nicholas Harisch Measuring vehicle speed with video [  thesis] thesis] |
Bachelor Thesis |
 |
Jonas Macho Ray traversal with omnidirectional distance fields in voxel worlds [ |
Bachelor Thesis |
 |
Sebastian Schrammel Meshing Sparse SDFs [ |
Bachelor Thesis |
 |
Stefan Trenovatz License Plate detection with video [  thesis] thesis] |
Bachelor Thesis |
 |
Tobias Müller Real-time bike-related traffic violation detection of cars [  thesis] thesis] |
Bachelor Thesis |
 |
Jonathan Prölß Building a drone platform for autonomous scanning [  thesis] thesis] |
Bachelor Thesis |
 |
Ademir Hamzic Visualizing change detection on mobile [  thesis] thesis] |
Bachelor Thesis |
 |
Oliver Kubicek Real-time Change Detection [  thesis] thesis] |
Bachelor Thesis |
 |
Marcel Kozonits Optimize cyclesafely pipeline [  ] ] |
Bachelor Thesis |
| Klemens Wiesinger Using a drone for automated 3D Scanning [  thesis] thesis] |
Bachelor Thesis | |
 |
Peter Fuchs Efficient User Guidance to Next-Best-View Scan Positions [  thesis] thesis] |
Bachelor Thesis |
 |
Stefan Steinheber Observation and Tracking of Plant Health using Computer Vision |
Bachelor Thesis |
| Simon Pointner Cycle Safely [  thesis] thesis] |
Master Thesis | |
| 2024 | ||
 |
Diana Marin, Amal Dev Parakkat, Stefan Ohrhallinger, Michael Wimmer, Steve Oudot, Pooran Memari SING: Stability-Incorporated Neighborhood Graph In SA '24: SIGGRAPH Asia 2024 Conference Papers, pages 1-10. December 2024. [  paper] paper] |
Conference Paper |
 |
Matyas Hoffer-Toth CycleSafely on mobile [  thesis] thesis] |
Bachelor Thesis |
 |
Diana Marin, Filippo Maggioli, Simone Melzi, Stefan Ohrhallinger, Michael Wimmer Reconstructing Curves from Sparse Samples on Riemannian Manifolds Computer Graphics Forum, 43(5):e15136, June 2024. |
Journal Paper with Conference Talk |
 |
Stefan Ohrhallinger, Diana Marin Sampling and reconstructing point clouds, 28. May 2024, Graz |
Invited Talk |
 |
Diana Marin, Patrick Komon, Stefan Ohrhallinger, Michael Wimmer Distributed Surface Reconstruction Poster shown at 45th Annual Conference of the European Association for Computer Graphics (Eurographics 2024) (22. April 2024-26. April 2024) In EG 2024 - Posters . |
Poster |
 |
Diana Marin, Stefan Ohrhallinger, Michael Wimmer Parameter-free connectivity for point clouds In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications - Volume 1, HUCAPP and IVAPP, pages 92-102. February 2024. [  paper] paper] |
Conference Paper |
 |
Amal Dev Parakkat, Stefan Ohrhallinger, Elmar Eisemann, Pooran Memari BallMerge: High‐quality Fast Surface Reconstruction via Voronoi Balls Computer Graphics Forum, 43(2), 2024. [  paper] paper] |
Journal Paper with Conference Talk |
| 2023 | ||
 |
Stefan Ohrhallinger, Amal Dev Parakkat, Pooran Memari Feature-Sized Sampling for Vector Line Art In Proceedings of the 31th Pacific Conference on Computer Graphics and Applications, pages 1-2. October 2023. [  paper] [talk] paper] [talk] |
Conference Paper |
| Brigitte Withalm Transport Mode Detection Segmentation [  thesis] thesis] |
Bachelor Thesis | |
 |
Klemens Wiesinger Using a Drone for Automated 3D Scanning |
Bachelor Thesis |
 |
Diana Marin, Stefan Ohrhallinger, Michael Wimmer Parameter-Free and Improved Connectivity for Point Clouds Poster shown at Eurographics 2023 ( 8. May 2023-12. May 2023) In Eurographics 2023 - Posters , pages 5-6. [  paper] paper] |
Poster |
 |
Michael Rubik CycleSafely Acquire Data [ 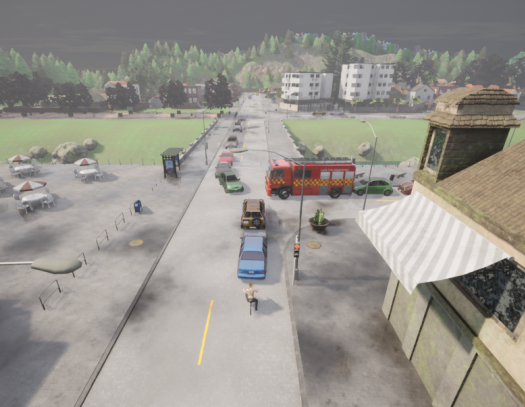 image] image] |
Bachelor Thesis |
| 2022 | ||
 |
Diana Marin, Stefan Ohrhallinger, Michael Wimmer SIGDT: 2D Curve Reconstruction Computer Graphics Forum, 41(7):25-36, October 2022. [  Paper] [Paper] Paper] [Paper] |
Journal Paper with Conference Talk |
 |
Ahmed El Agrod Immersive Redesign [  thesis] thesis] |
Bachelor Thesis |
 |
Stefan Ohrhallinger Curve/Surface Reconstruction and Occlusion-enabled Applications, 2. May 2022, LiX Polytechnique, Saclay-Paris, France |
Invited Talk |
 |
Stefan Ohrhallinger, Amal Dev Parakkat, Jiju Peethambaran Shape Reconstruction: From Theory to Practice In Eurographics 2022 - Tutorials. April 2022. [website] |
Other Reviewed Publication |
 |
Diana Marin, Stefan Ohrhallinger, Michael Wimmer SIG-based Curve Reconstruction Poster shown at Eurographics 2022 - 43rd Annual Conference of the European Association for Computer Graphics (25. April 2022-29. April 2022) In Eurographics 2022 - Posters . [  paper] [ paper] [ poster] [Paper] poster] [Paper] |
Poster |
 |
Thomas Steinschauer Change Detection using the InfiniTAM framework [  bachelor thesis] [ bachelor thesis] [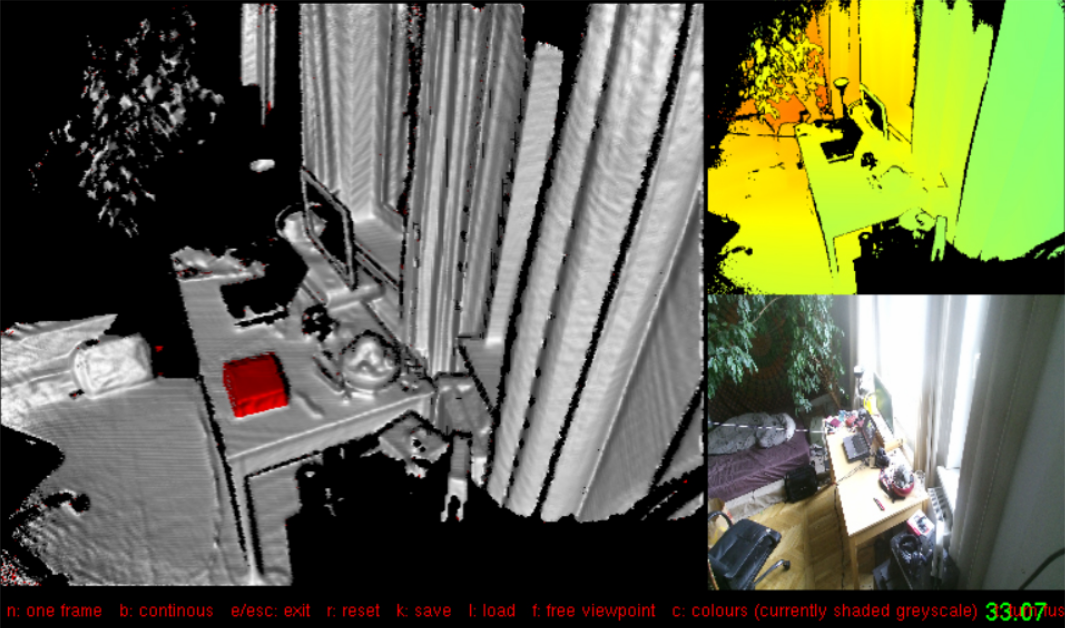 image] image] |
Bachelor Thesis |
| Stefan Ohrhallinger, Amal Dev Parakkat, Jiju Peethambaran ECCV 2022 Tutorial on Outline and Shape Reconstruction in 2D, 22-10-23-22-10-27, Tel Aviv |
Invited Talk | |
| 2021 | ||
 |
Stefan Ohrhallinger, Jiju Peethambaran, Amal Dev Parakkat, Tamal K Dey, Ramanathan Muthuganapathy 2D Points Curve Reconstruction Survey and Benchmark Computer Graphics Forum, 1:611-632, March 2021. [  paper] [Website] paper] [Website] |
Journal Paper with Conference Talk |
 |
Dennis Depner 3D Scan Integration [  paper] [source] paper] [source] |
Bachelor Thesis |