

Thomas Steinschauer
Change Detection using the InfiniTAM framework
[ bachelor thesis] [image]
bachelor thesis] [image]
Information
- Publication Type: Bachelor Thesis
- Workgroup(s)/Project(s):
- Date: January 2022
- Date (Start): 23. March 2020
- Date (End): 24. January 2022
- Matrikelnummer: 01426150
- First Supervisor: Stefan Ohrhallinger

- Keywords: change detection, uncertainty, 3d scanning
Abstract
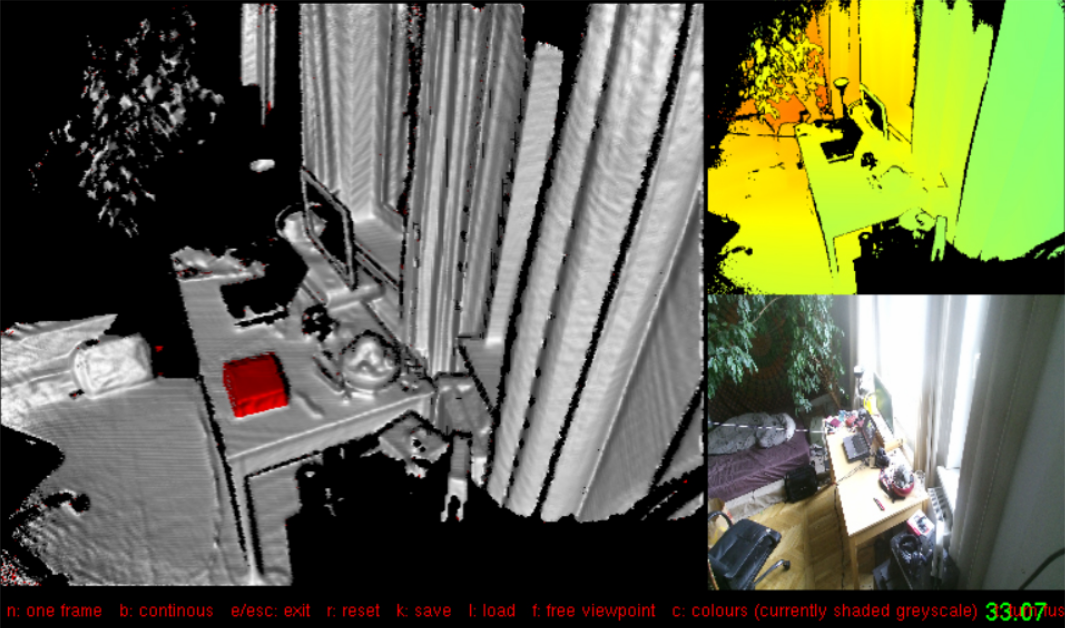
The automated detection of changes in a 3D space can be a useful tool. [PCBS16] names 3D surface reconstruction, environment monitoring, natural events management, and forensic science as possible application scenarios. In this work, we introduce software that scans an area at two different points in time and detects the changes between these scans. The software is based on InfiniTAM [PKG+17], a framework released under an Oxford University License. InfiniTAM integrates multiple depth images (e.g. recorded with a Kinect-V2-Camera) to a 3D model using volumetric representations. Because of the volumetric representation and the fast GPU computation, the change detection can happen in real-time. This is outstanding because in other approaches, (like [PCBS16]) the change detection can take minutes. Other approaches that detect changes in real-time (like [KMK+19]) use the same representation of data (T-SDF) as we do. Our approach also takes sensor tolerance into account, which leads to a reduction of false change detections. This work can be seen as a starting point for more specific use cases (like [LTW+21]) who specify on scene change detection and overcoming unnecessary changes such as light and seasons.Additional Files and Images

Weblinks
No further information available.BibTeX
@bachelorsthesis{steinschauer-2020-baa,
title = "Change Detection using the InfiniTAM framework",
author = "Thomas Steinschauer",
year = "2022",
abstract = "The automated detection of changes in a 3D space can be a
useful tool. [PCBS16] names 3D surface reconstruction,
environment monitoring, natural events management, and
forensic science as possible application scenarios. In this
work, we introduce software that scans an area at two
different points in time and detects the changes between
these scans. The software is based on InfiniTAM [PKG+17], a
framework released under an Oxford University License.
InfiniTAM integrates multiple depth images (e.g. recorded
with a Kinect-V2-Camera) to a 3D model using volumetric
representations. Because of the volumetric representation
and the fast GPU computation, the change detection can
happen in real-time. This is outstanding because in other
approaches, (like [PCBS16]) the change detection can take
minutes. Other approaches that detect changes in real-time
(like [KMK+19]) use the same representation of data (T-SDF)
as we do. Our approach also takes sensor tolerance into
account, which leads to a reduction of false change
detections. This work can be seen as a starting point for
more specific use cases (like [LTW+21]) who specify on scene
change detection and overcoming unnecessary changes such as
light and seasons.",
month = jan,
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Research Unit of Computer Graphics, Institute of Visual
Computing and Human-Centered Technology, Faculty of
Informatics, TU Wien ",
keywords = "change detection, uncertainty, 3d scanning",
URL = "https://www.cg.tuwien.ac.at/research/publications/2022/steinschauer-2020-baa/",
}