

Point clouds are a quintessential 3D geometry representation format, and often the first model obtained from reconstructive efforts, such as LIDAR scans. IVILPC aims for fast, authentic, interactive, and high-quality processing of such point-based data sets. Our project explores high-performance software rendering routines for various point-based primitives, such as point sprites, gaussian splats, surfels, and particle systems. Beyond conventional use cases, point cloud rendering also forms a key component of point-based machine learning methods and novel-view synthesis, where performance is paramount. We will exploit the flexibility and processing power of cutting-edge GPU architecture features to formulate novel, high-performance rendering approaches. The envisioned solutions will be applicable to unstructured point clouds for instant rendering of billions of points. Our research targets minimally-invasive compression, culling methods, and level-of-detail techniques for point-based rendering to deliver high performance and quality on-demand. We explore GPU-accelerated editing of point clouds, as well as common display issues on next-generation display devices. IVILPC lays the foundation for interaction with large point clouds in conventional and immersive environments. Its goal is an efficient data knowledge transfer from sensor to user, with a wide range of use cases to image-based rendering, virtual reality (VR) technology, architecture, the geospatial industry, and cultural heritage.
Funding
- WWTF Wiener Wissenschafts-, Forschungs- und Technologiefonds
Team
News
Research Areas
 In this area, we concentrate on algorithms that synthesize images to depict 3D models or scenes, often by simulating or approximating the physics of light.
In this area, we concentrate on algorithms that synthesize images to depict 3D models or scenes, often by simulating or approximating the physics of light. Uses concepts from applied mathematics and computer science to design efficient algorithms for the reconstruction, analysis, manipulation, simulation and transmission of complex 3D models. Example applications are collision detection, reconstruction, compression, occlusion-aware surface handling and improved sampling conditions.
Uses concepts from applied mathematics and computer science to design efficient algorithms for the reconstruction, analysis, manipulation, simulation and transmission of complex 3D models. Example applications are collision detection, reconstruction, compression, occlusion-aware surface handling and improved sampling conditions.
In this area, we focus on user experiences and rendering algorithms for virtual reality environments, including methods to navigate and collaborate in VR, foveated rendering, exploit human perception and simulate visual deficiencies.
Publications
| Image | Bib Reference | Publication Type |
|---|---|---|
| 2026 | ||
 |
Markus Schütz , Lukas Lipp, Elias Kristmann, Michael Wimmer , Lukas Lipp, Elias Kristmann, Michael WimmerCuRast: Cuda-Based Software Rasterization for Billions of Triangles Computer Graphics Forum, 45(4):e70538, July 2026. [  paper] paper] |
Journal Paper with Conference Talk |
 |
Elias Kristmann, Michael Wimmer, Markus Schütz Variable‐Rate Texture Compression: Real‐Time Rendering with JPEG Computer Graphics Forum, 45(2):e70338, May 2026. [  paper] paper] |
Journal Paper with Conference Talk |
 |
Angeliki Grammatikaki, Johannes Eschner, Pedro Hermosilla, Oscar Argudo, Manuela Waldner TreeON: Reconstructing 3D Tree Point Clouds from Orthophotos and Heightmaps Computer Graphics Forum:e70366, 2026. [  paper] paper] |
Journal Paper with Conference Talk |
| 2025 | ||
 |
Markus Schütz, Christoph Peters, Florian Hahlbohm, Elmar Eisemann, Marcus Magnor, Michael Wimmer Splatshop: Efficiently Editing Large Gaussian Splat Models Computer Graphics Forum, 44(8), June 2025. |
Journal Paper (without talk) |
 |
Philipp Erler, Lukas Herzberger, Michael Wimmer, Markus Schütz LidarScout: Direct Out-of-Core Rendering of Massive Point Clouds In High-Performance Graphics 2025 - Symposium Papers. June 2025. [  Paper] [ Paper] [ video] [ video] [ |
Conference Paper |
 |
Annalena Ulschmid, Katharina Krösl, Michael Wimmer, Bernhard Kerbl Automated Prioritization for Context-Aware Re-rendering in Editing SN Computer Science, 6(2025), 2025. [  paper] [GitHub] paper] [GitHub] |
Journal Paper (without talk) |
| 2024 | ||
 |
Rahul Goel, Markus Schütz, P. J. Narayanan, Bernhard Kerbl Real-Time Decompression and Rasterization of Massive Point Clouds Proceedings of the ACM on Computer Graphics and Interactive Techniques, 7(3):48, August 2024. |
Journal Paper with Conference Talk |
| Bernhard Kerbl, Andréas Meuleman, Georgios Kopanas, Michael Wimmer, Alexandre Lanvin, G. Drettakis A Hierarchical 3D Gaussian Representation for Real-Time Rendering of Very Large Datasets ACM Transactions on Graphics, 43(4):62, July 2024. [  paper] paper] |
Journal Paper with Conference Talk | |
 |
Markus Schütz, Lukas Herzberger, Michael Wimmer SimLOD: Simultaneous LOD Generation and Rendering for Point Clouds Proceedings of the ACM on Computer Graphics and Interactive Techniques, 7(1):17, May 2024. [  paper] paper] |
Journal Paper with Conference Talk |
| Panagiotis Papantonakis, Georgios Kopanas, Bernhard Kerbl, Alexandre Lanvin, George Drettakis Reducing the Memory Footprint of 3D Gaussian Splatting Proceedings of the ACM on Computer Graphics and Interactive Techniques, 7(1):1-17, May 2024. |
Journal Paper (without talk) | |
 |
Johannes Unterguggenberger, Lukas Lipp, Michael Wimmer, Bernhard Kerbl, Markus Schütz Fast Rendering of Parametric Objects on Modern GPUs In EGPGV24: Eurographics Symposium on Parallel Graphics and Visualization. May 2024. [ 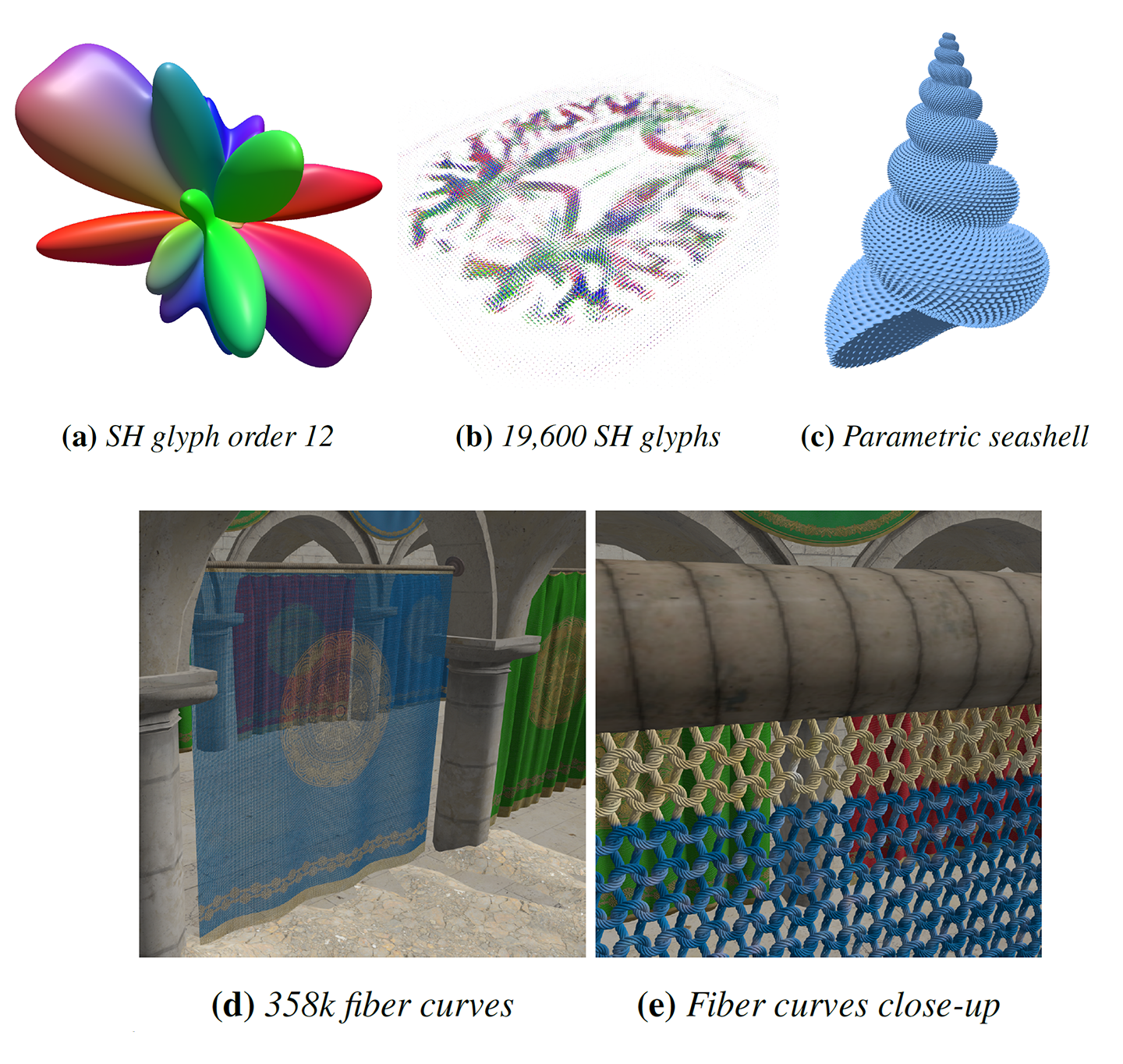 image] [ image] [ paper] paper] |
Conference Paper |
 |
Annalena Ulschmid, Bernhard Kerbl, Katharina Krösl, Michael Wimmer Real-Time Editing of Path-Traced Scenes with Prioritized Re-Rendering In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications - GRAPP and VISIGRAPP, pages 46-57. February 2024. [  paper] [GitHub] paper] [GitHub] |
Conference Paper |
| 2023 | ||
 |
Philip Voglreiter, Bernhard Kerbl, Alexander Weinrauch, Joerg Hermann Mueller, Thomas Neff, Markus Steinberger, Dieter Schmalstieg Trim Regions for Online Computation of From-Region Potentially Visible Sets ACM Transactions on Graphics, 42(4):1-15, August 2023. |
Journal Paper (without talk) |