

Philipp Erler
Smart Surface Reconstruction
Supervisor: Michael Wimmer
Duration: September 2017 — 11. February 2026
[ thesis]
thesis]
Information
- Publication Type: PhD-Thesis
- Workgroup(s)/Project(s):
- Date: February 2026
- Date (Start): September 2017
- Date (End): 11. February 2026
- TU Wien Library: AC17899642
- Open Access: yes
- 1st Reviewer: Angela Dai
- 2nd Reviewer: Paolo Cignoni
- Rigorosum: 11. February 2026
- First Supervisor: Michael Wimmer
- Pages: 112
- Keywords: Surface Reconstruction, Deep Learning, Point Cloud
Abstract
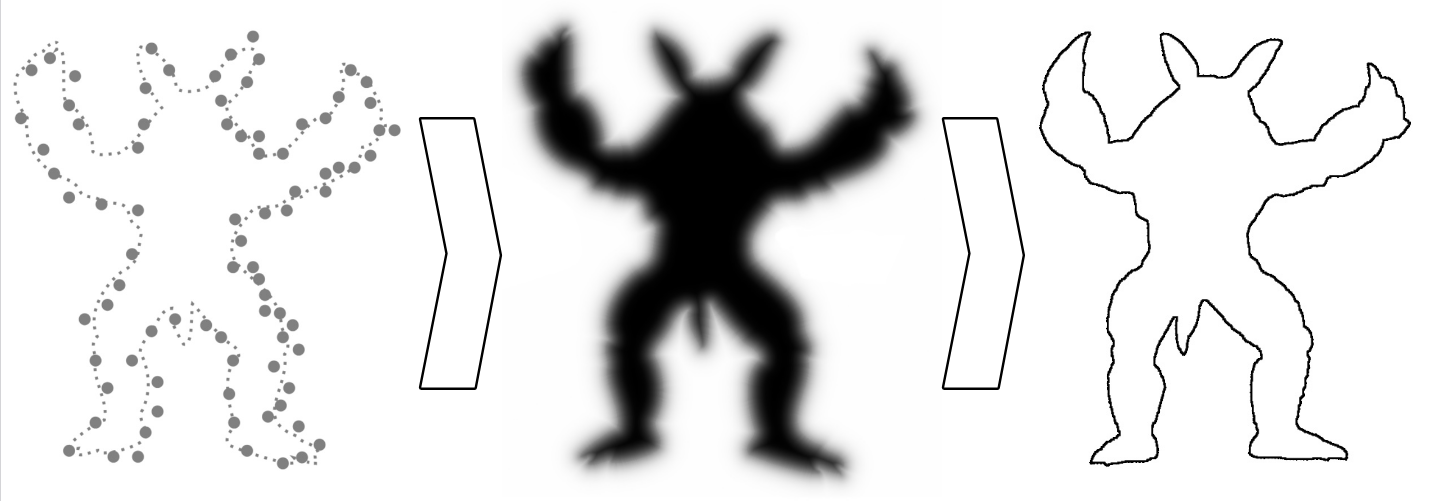
Point clouds, while easy to acquire, are often noisy, incomplete, and lack connectivity. They cannot represent closed surfaces efficiently, and processing for geometrical applications like 3D printing is difficult. Therefore, we want to convert them to surface representations, most importantly, triangle meshes. This dissertation addresses the challenge of reconstructing accurate and robust 3D objects from imperfect point clouds. Traditional methods struggle with point cloud defects, motivating the exploration of data-driven approaches. However, deep learning on point clouds is difficult due to their unordered and unstructured nature. Further, subsampling is necessary to fit them into the fixed-size input of a neural network, which introduces randomness. In this thesis, we explore solutions for these challenges. We present three main contributions: Points2Surf, which combines local and global priors to generalize surface reconstruction across diverse object classes; PPSurf, which leverages point convolutions and attention to further improve reconstruction quality; and LidarScout, which enables real-time, out-of-core rendering of massive aerial LIDAR scans by focusing on efficient, local heightmap estimation. Our results demonstrate that balancing local detail with global context is key to achieving high-quality, generalizable reconstructions. We show that model design, data augmentation, and efficient representations are crucial for handling noise and missing data. The findings offer practical solutions for reconstructions from single objects to entire landscapes.Additional Files and Images

Weblinks
- Entry in reposiTUm (TU Wien Publication Database)
- CatalogPlus (TU Wien Library)
- DOI: 10.34726/hss.2026.139540
BibTeX
@phdthesis{erler_philipp-2017-phd,
title = "Smart Surface Reconstruction",
author = "Philipp Erler",
year = "2026",
abstract = "Point clouds, while easy to acquire, are often noisy,
incomplete, and lack connectivity. They cannot represent
closed surfaces efficiently, and processing for geometrical
applications like 3D printing is difficult. Therefore, we
want to convert them to surface representations, most
importantly, triangle meshes. This dissertation addresses
the challenge of reconstructing accurate and robust 3D
objects from imperfect point clouds. Traditional methods
struggle with point cloud defects, motivating the
exploration of data-driven approaches. However, deep
learning on point clouds is difficult due to their unordered
and unstructured nature. Further, subsampling is necessary
to fit them into the fixed-size input of a neural network,
which introduces randomness. In this thesis, we explore
solutions for these challenges. We present three main
contributions: Points2Surf, which combines local and global
priors to generalize surface reconstruction across diverse
object classes; PPSurf, which leverages point convolutions
and attention to further improve reconstruction quality; and
LidarScout, which enables real-time, out-of-core rendering
of massive aerial LIDAR scans by focusing on efficient,
local heightmap estimation. Our results demonstrate that
balancing local detail with global context is key to
achieving high-quality, generalizable reconstructions. We
show that model design, data augmentation, and efficient
representations are crucial for handling noise and missing
data. The findings offer practical solutions for
reconstructions from single objects to entire landscapes.",
month = feb,
pages = "112",
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Research Unit of Computer Graphics, Institute of Visual
Computing and Human-Centered Technology, Faculty of
Informatics, TU Wien ",
keywords = "Surface Reconstruction, Deep Learning, Point Cloud",
URL = "https://www.cg.tuwien.ac.at/research/publications/2026/erler_philipp-2017-phd/",
}