

In recent years, virtual and augmented reality have gained widespread attention because of newly developed head-mounted displays. For the first time, mass-market penetration seems plausible. Also, range sensors are on the verge of being integrated into smartphones, evidenced by prototypes such as the Google Tango device, making ubiquitous on-line acquisition of 3D data a possibility. The combination of these two technologies – displays and sensors – promises applications where users can directly be immersed into an experience of 3D data that was just captured live. However, the captured data needs to be processed and structured before being displayed. For example, sensor noise needs to be removed, normals need to be estimated for local surface reconstruction, etc. The challenge is that these operations involve a large amount of data, and in order to ensure a lag-free user experience, they need to be performed in real time, i.e., in just a few milliseconds per frame. In this proposal, we exploit the fact that dynamic point clouds captured in real time are often only relevant for display and interaction in the current frame and inside the current view frustum. In particular, we propose a new view-dependent data structure that permits efficient connectivity creation and traversal of unstructured data, which will speed up surface recovery, e.g. for collision detection. Classifying occlusions comes at no extra cost, which will allow quick access to occluded layers in the current view. This enables new methods to explore and manipulate dynamic 3D scenes, overcoming interaction methods that rely on physics-based metaphors like walking or flying, lifting interaction with 3D environments to a “superhuman” level.
Funding
- FWF P32418-N31
Team
Research Areas
 Uses concepts from applied mathematics and computer science to design efficient algorithms for the reconstruction, analysis, manipulation, simulation and transmission of complex 3D models. Example applications are collision detection, reconstruction, compression, occlusion-aware surface handling and improved sampling conditions.
Uses concepts from applied mathematics and computer science to design efficient algorithms for the reconstruction, analysis, manipulation, simulation and transmission of complex 3D models. Example applications are collision detection, reconstruction, compression, occlusion-aware surface handling and improved sampling conditions.
In this area, we focus on user experiences and rendering algorithms for virtual reality environments, including methods to navigate and collaborate in VR, foveated rendering, exploit human perception and simulate visual deficiencies.
Publications
| Image | Bib Reference | Publication Type |
|---|---|---|
| 2026 | ||
 |
Philipp Erler Smart Surface Reconstruction Supervisor: Michael Wimmer Duration: September 2017 — 11. February 2026 [  thesis] thesis] |
PhD-Thesis |
| 2024 | ||
 |
Diana Marin, Stefan Ohrhallinger, Michael Wimmer Parameter-free connectivity for point clouds In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications - Volume 1, HUCAPP and IVAPP, pages 92-102. February 2024. [  paper] paper] |
Conference Paper |
 |
Philipp Erler, Lizeth Fuentes-Perez, Pedro Hermosilla-Casajus, Paul Guerrero, Renato Pajarola, Michael Wimmer PPSurf: Combining Patches and Point Convolutions for Detailed Surface Reconstruction Computer Graphics Forum, 43(1):tbd-tbd, January 2024. [  paper] [ paper] [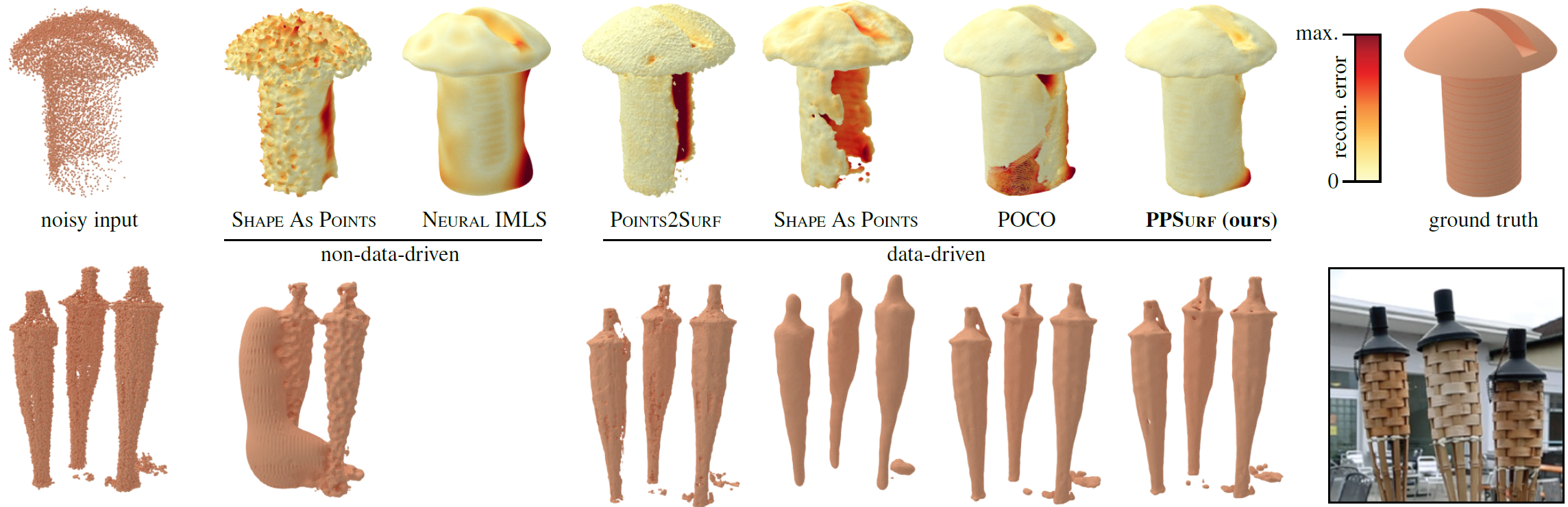 teaser] [Live System] [Repo (Github)] teaser] [Live System] [Repo (Github)] |
Journal Paper with Conference Talk |
 |
Amal Dev Parakkat, Stefan Ohrhallinger, Elmar Eisemann, Pooran Memari BallMerge: High‐quality Fast Surface Reconstruction via Voronoi Balls Computer Graphics Forum, 43(2), 2024. [  paper] paper] |
Journal Paper with Conference Talk |
| 2021 | ||
 |
Alexius Rait Fast Radial Search for Progressive Photon Mapping [  thesis] thesis] |
Bachelor Thesis |
| 2020 | ||
 |
Markus Schütz, Stefan Ohrhallinger, Michael Wimmer Fast Out-of-Core Octree Generation for Massive Point Clouds Computer Graphics Forum, 39(7):1-13, November 2020. [  paper] paper] |
Journal Paper with Conference Talk |
 |
Philipp Erler, Paul Guerrero, Stefan Ohrhallinger, Michael Wimmer, Niloy Mitra Points2Surf: Learning Implicit Surfaces from Point Clouds In Computer Vision -- ECCV 2020, pages 108-124. October 2020. [  points2surf_paper] [ points2surf_paper] [ short video] short video] |
Conference Paper |
 |
Markus Schütz, Gottfried Mandlburger, Johannes Otepka, Michael Wimmer Progressive Real-Time Rendering of One Billion Points Without Hierarchical Acceleration Structures Computer Graphics Forum, 39(2):51-64, May 2020. [  paper] paper] |
Journal Paper with Conference Talk |
 |
Kurt Leimer, Andreas Winkler, Stefan Ohrhallinger, Przemyslaw Musialski Pose to Seat: Automated design of body-supporting surfaces Computer Aided Geometric Design, 79:1-1, April 2020. [  image] [ image] [ Paper] [paper] Paper] [paper] |
Journal Paper (without talk) |