

Claus Scheiblauer, Michael Wimmer
Out-of-Core Selection and Editing of Huge Point Clouds
Computers & Graphics, 35(2):342-351, April 2011. [ paper]
paper]
Information
- Publication Type: Journal Paper (without talk)
- Workgroup(s)/Project(s):
- Date: April 2011
- ISSN: 0097-8493
- Journal: Computers & Graphics
- Number: 2
- Volume: 35
- Pages: 342 – 351
- Keywords: Graphics data structures and data types, Viewing algorithms, Point-based rendering
Abstract
In this paper we present an out-of-core editing system for point clouds, which allows selecting and modifying arbitrary parts of a huge point cloud interactively. We can use the selections to segment the point cloud, to delete points, or to render a preview of the model without the points in the selections. Furthermore we allow for inserting points into an already existing point cloud. All operations are conducted on a rendering optimized data structure that uses the raw point cloud from a laser scanner, and no additionally created points are needed for an ecient level-of-detail (LOD) representation using this data structure. We also propose an algorithm to alleviate the artifacts when rendering a point cloud with large discrepancies in density in dierent areas by estimating point sizes heuristically. These estimated point sizes can be used to mimic a closed surface on the raw point cloud, also when the point cloud is composed of several raw laser scans.Additional Files and Images
Additional images and videos
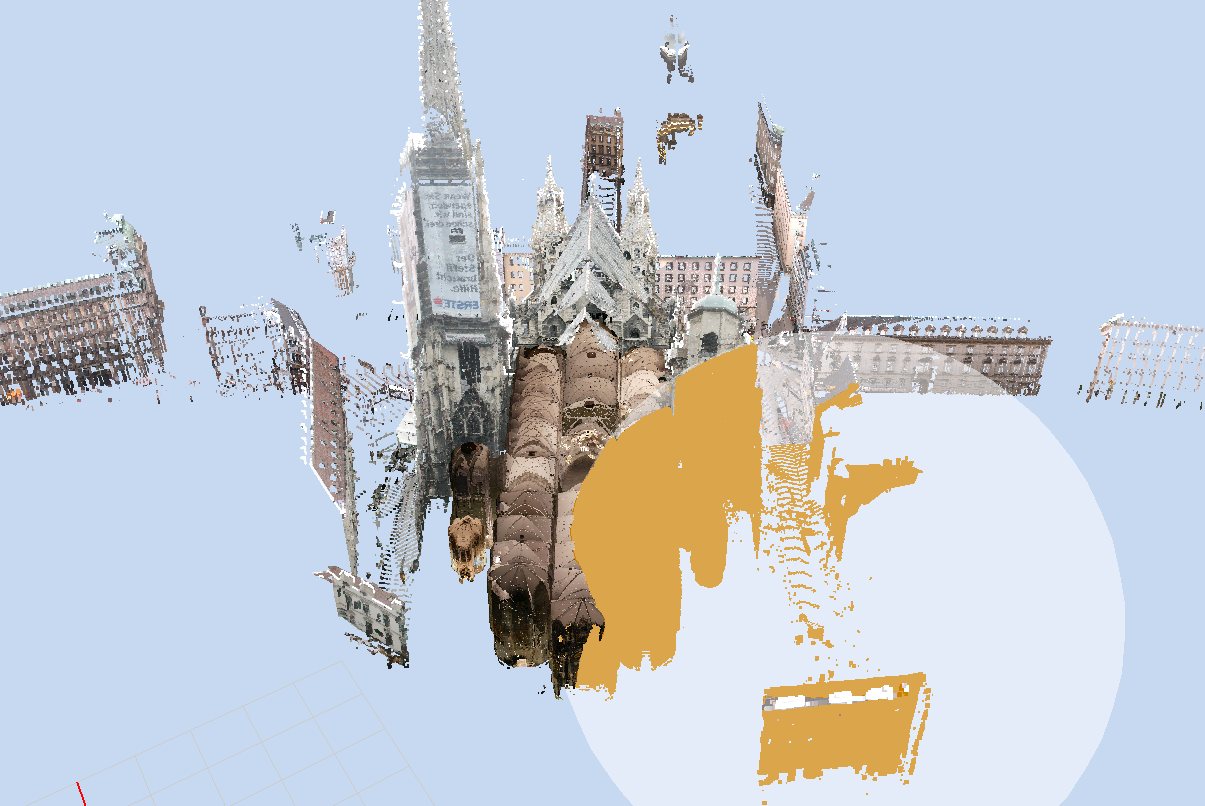
image:
Selecting points
Additional files
 paper:
Out-of-Core Selection and Editing of Huge Point Clouds
paper:
Out-of-Core Selection and Editing of Huge Point Clouds
Weblinks
No further information available.BibTeX
@article{scheiblauer-2011-cag,
title = "Out-of-Core Selection and Editing of Huge Point Clouds",
author = "Claus Scheiblauer and Michael Wimmer",
year = "2011",
abstract = "In this paper we present an out-of-core editing system for
point clouds, which allows selecting and modifying arbitrary
parts of a huge point cloud interactively. We can use the
selections to segment the point cloud, to delete points, or
to render a preview of the model without the points in the
selections. Furthermore we allow for inserting points into
an already existing point cloud. All operations are
conducted on a rendering optimized data structure that uses
the raw point cloud from a laser scanner, and no
additionally created points are needed for an ecient
level-of-detail (LOD) representation using this data
structure. We also propose an algorithm to alleviate the
artifacts when rendering a point cloud with large
discrepancies in density in dierent areas by estimating
point sizes heuristically. These estimated point sizes can
be used to mimic a closed surface on the raw point cloud,
also when the point cloud is composed of several raw laser
scans.",
month = apr,
issn = "0097-8493",
journal = "Computers & Graphics",
number = "2",
volume = "35",
pages = "342--351",
keywords = "Graphics data structures and data types, Viewing algorithms,
Point-based rendering",
URL = "https://www.cg.tuwien.ac.at/research/publications/2011/scheiblauer-2011-cag/",
}