

Klemens Wiesinger
Using a drone for automated 3D Scanning
[ thesis]
thesis]
Information
- Publication Type: Bachelor Thesis
- Workgroup(s)/Project(s):
- Date: March 2025
- Date (Start): 13. July 2023
- Date (End): 28. March 2025
- Matrikelnummer: 11938253
- First Supervisor:
- Keywords: drone, scanning, automation

Abstract
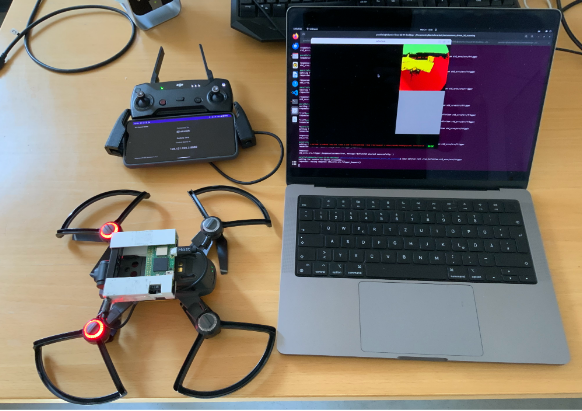
Drones have been widely adopted over the past decades, aiding in critical tasks such as search and rescue, inspection, and mapping. Autonomous drone scanning could further support such missions, but remains a significant challenge in indoor environments. This thesis explores the feasibility of using a consumer drone for such autonomous indoor 3D scanning. Our approach combines a DJI Spark drone, a lightweight Pico Flexx depth sensor, and a Raspberry Pi to capture depth data, which is streamed to an external server for real-time processing. The system leverages ROS 2 and InfiniTAM for SLAM and map reconstruction, while navigation commands are issued via a smartphone using DJI’s Mobile SDK. Although the system successfully completed a limited autonomous scan, various con- straints—including the drone’s payload capacity, limited sensor range, and hardware instabilities—posed significant challenges. Despite these limitations, a modular software architecture was developed that integrates sensing, mapping, and navigation. This framework provides a solid foundation for future work toward fully autonomous indoor scanning with more capable hardware. However, generating the next best view and finding a feasible path toward it remain open challenges.Additional Files and Images

Weblinks
No further information available.BibTeX
@bachelorsthesis{wiesinger_2025-baa,
title = "Using a drone for automated 3D Scanning",
author = "Klemens Wiesinger",
year = "2025",
abstract = "Drones have been widely adopted over the past decades,
aiding in critical tasks such as search and rescue,
inspection, and mapping. Autonomous drone scanning could
further support such missions, but remains a significant
challenge in indoor environments. This thesis explores the
feasibility of using a consumer drone for such autonomous
indoor 3D scanning. Our approach combines a DJI Spark drone,
a lightweight Pico Flexx depth sensor, and a Raspberry Pi to
capture depth data, which is streamed to an external server
for real-time processing. The system leverages ROS 2 and
InfiniTAM for SLAM and map reconstruction, while navigation
commands are issued via a smartphone using DJI’s Mobile
SDK. Although the system successfully completed a limited
autonomous scan, various con- straints—including the
drone’s payload capacity, limited sensor range, and
hardware instabilities—posed significant challenges.
Despite these limitations, a modular software architecture
was developed that integrates sensing, mapping, and
navigation. This framework provides a solid foundation for
future work toward fully autonomous indoor scanning with
more capable hardware. However, generating the next best
view and finding a feasible path toward it remain open
challenges.",
month = mar,
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Research Unit of Computer Graphics, Institute of Visual
Computing and Human-Centered Technology, Faculty of
Informatics, TU Wien ",
keywords = "drone, scanning, automation",
URL = "https://www.cg.tuwien.ac.at/research/publications/2025/wiesinger_2025-baa/",
}