

 thesis
thesisInformation
- Publication Type: Master Thesis
- Workgroup(s)/Project(s):
- Date: September 2016
- Date (Start): 1. August 2014
- Date (End): 10. September 2016
- TU Wien Library:
- First Supervisor: Michael Wimmer

- Keywords: point cloud rendering, WebGL, LIDAR
Abstract
This thesis introduces Potree, a web-based renderer for large point clouds. It allows users to view data sets with billions of points, from sources such as LIDAR or photogrammetry, in real time in standard web browsers. One of the main advantages of point cloud visualization in web browser is that it allows users to share their data sets with clients or the public without the need to install third-party applications and transfer huge amounts of data in advance. The focus on large point clouds, and a variety of measuring tools, also allows users to use Potree to look at, analyze and validate raw point cloud data, without the need for a time-intensive and potentially costly meshing step. The streaming and rendering of billions of points in web browsers, without the need to load large amounts of data in advance, is achieved with a hierarchical structure that stores subsamples of the original data at different resolutions. A low resolution is stored in the root node and with each level, the resolution gradually increases. The structure allows Potree to cull regions of the point cloud that are outside the view frustum, and to render distant regions at a lower level of detail. The result is an open source point cloud viewer, which was able to render point cloud data sets of up to 597 billion points, roughly 1.6 terabytes after compression, in real time in a web browser.Additional Files and Images
Additional images and videos
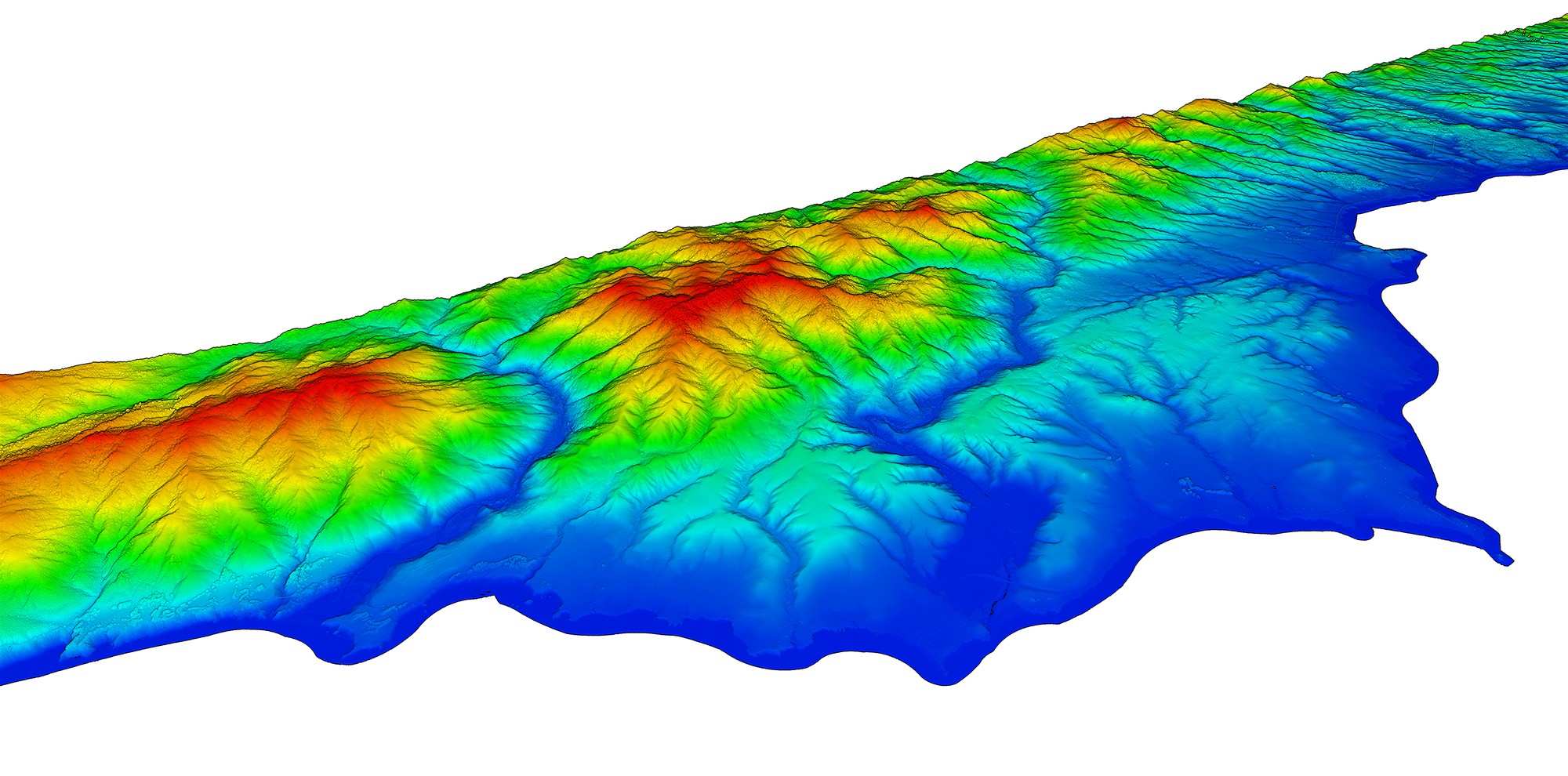 San Luis Obispo County coast:
Around 17 billion points.
Point cloud courtesy of Open Topography and PG&E.
San Luis Obispo County coast:
Around 17 billion points.
Point cloud courtesy of Open Topography and PG&E.
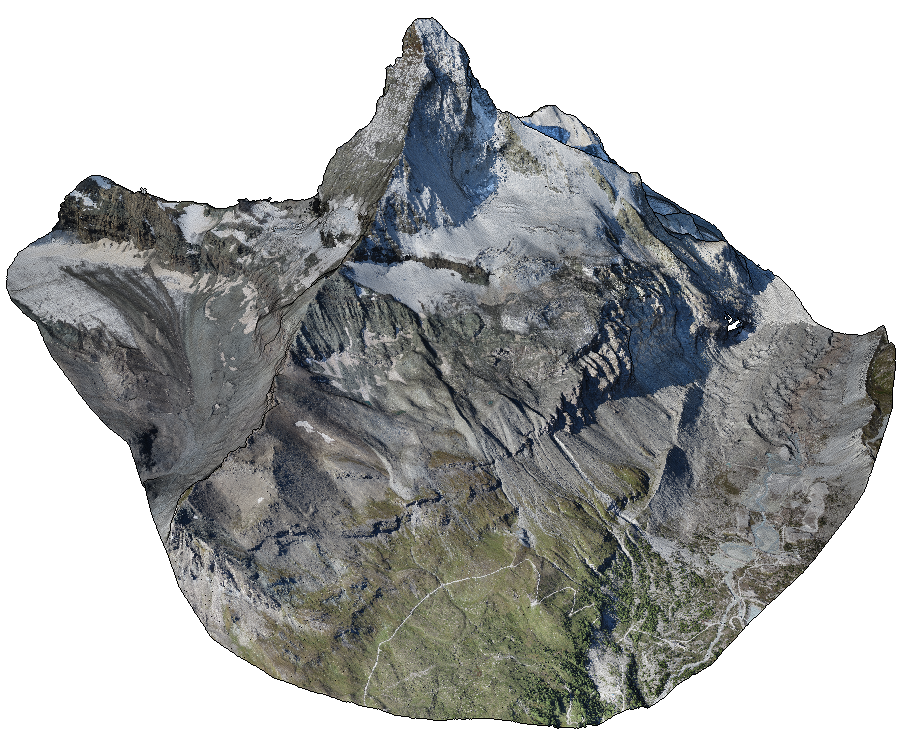 Matterhorn:
Around 280 million points.
Point cloud courtesy of Pix4D.
Matterhorn:
Around 280 million points.
Point cloud courtesy of Pix4D.
 Retz:
Point cloud courtesy of Riegl.
Retz:
Point cloud courtesy of Riegl.
Additional files

Weblinks
BibTeX
@mastersthesis{SCHUETZ-2016-POT,
title = "Potree: Rendering Large Point Clouds in Web Browsers",
author = "Markus Sch\"{u}tz",
year = "2016",
abstract = "This thesis introduces Potree, a web-based renderer for
large point clouds. It allows users to view data sets with
billions of points, from sources such as LIDAR or
photogrammetry, in real time in standard web browsers. One
of the main advantages of point cloud visualization in web
browser is that it allows users to share their data sets
with clients or the public without the need to install
third-party applications and transfer huge amounts of data
in advance. The focus on large point clouds, and a variety
of measuring tools, also allows users to use Potree to look
at, analyze and validate raw point cloud data, without the
need for a time-intensive and potentially costly meshing
step. The streaming and rendering of billions of points in
web browsers, without the need to load large amounts of data
in advance, is achieved with a hierarchical structure that
stores subsamples of the original data at different
resolutions. A low resolution is stored in the root node and
with each level, the resolution gradually increases. The
structure allows Potree to cull regions of the point cloud
that are outside the view frustum, and to render distant
regions at a lower level of detail. The result is an open
source point cloud viewer, which was able to render point
cloud data sets of up to 597 billion points, roughly 1.6
terabytes after compression, in real time in a web browser.",
month = sep,
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Institute of Computer Graphics and Algorithms, Vienna
University of Technology ",
keywords = "point cloud rendering, WebGL, LIDAR",
URL = "https://www.cg.tuwien.ac.at/research/publications/2016/SCHUETZ-2016-POT/",
}