

Oscar Martinez-Rubi, Stefan Verhoeven, Maarten van Meersbergen, Markus Schütz , Peter van Oosterom, Romulo Goncalves, Theo Tijssen
, Peter van Oosterom, Romulo Goncalves, Theo Tijssen
Taming the beast: Free and open-source massive point cloud web visualization
In Capturing Reality Forum, pages 1-1. November 2015.
Information
- Publication Type: Conference Paper
- Workgroup(s)/Project(s):
- Date: November 2015
- Lecturer: Oscar Martinez-Rubi
- Event: Capturing Reality Forum
- Booktitle: Capturing Reality Forum
- Conference date: 2015
- Pages: 1 – 1
Abstract
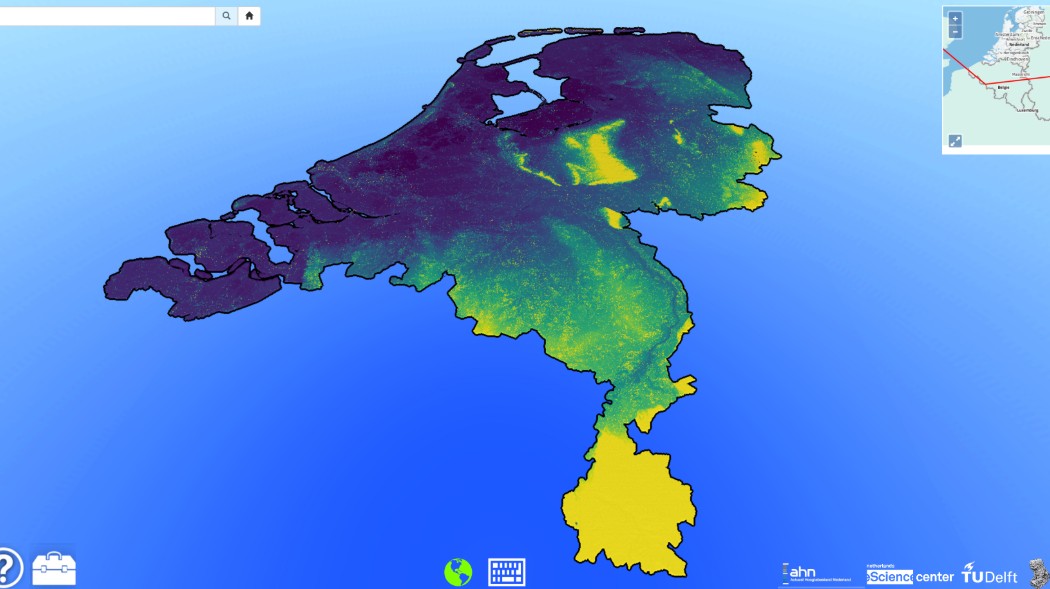
Powered by WebGL, some renderers have recently become available for the visualization of point cloud data over the web, for example Plasio or Potree. We have extended Potree to be able to visualize massive point clouds and we have successfully used it with the second national Lidar survey of the Netherlands, AHN2, with 640 billion points. In addition to the visualization, the publicly available service at ttp://ahn2.pointclouds.nl/ also features a multi-resolution download tool, a geographic name search bar, a measurement toolkit, a 2D orientation map with field of view depiction, a demo mode and the tuning of the visualization parameters. Potree relies on reorganizing the point cloud data into an multi-resolution octree data structure. However, this reorganization is very time consuming for massive data sets. Hence, we have used a divide and conquer approach to decrease the octree creation time. To achieve such performance improvement we divided the entire space into smaller cells, generated an octree for each of them in a distributed manner and then we merged them into a single massive octree. The merging is possible because the extent of all the nodes of the octrees is known and fixed. All the developed tools are free and open-source (FOSS) and they can be used to visualize over the web other massive point clouds.
Additional Files and Images

Weblinks
No further information available.BibTeX
@inproceedings{Martinez-2015-TTB,
title = "Taming the beast: Free and open-source massive point cloud
web visualization",
author = "Oscar Martinez-Rubi and Stefan Verhoeven and Maarten van
Meersbergen and Markus Sch\"{u}tz and Peter van Oosterom
and Romulo Goncalves and Theo Tijssen",
year = "2015",
abstract = "Powered by WebGL, some renderers have recently become
available for the visualization of point cloud data over the
web, for example Plasio or Potree. We have extended Potree
to be able to visualize massive point clouds and we have
successfully used it with the second national Lidar survey
of the Netherlands, AHN2, with 640 billion points. In
addition to the visualization, the publicly available
service at ttp://ahn2.pointclouds.nl/ also features a
multi-resolution download tool, a geographic name search
bar, a measurement toolkit, a 2D orientation map with field
of view depiction, a demo mode and the tuning of the
visualization parameters. Potree relies on reorganizing the
point cloud data into an multi-resolution octree data
structure. However, this reorganization is very time
consuming for massive data sets. Hence, we have used a
divide and conquer approach to decrease the octree creation
time. To achieve such performance improvement we divided the
entire space into smaller cells, generated an octree for
each of them in a distributed manner and then we merged them
into a single massive octree. The merging is possible
because the extent of all the nodes of the octrees is known
and fixed. All the developed tools are free and open-source
(FOSS) and they can be used to visualize over the web other
massive point clouds. ",
month = nov,
event = "Capturing Reality Forum",
booktitle = "Capturing Reality Forum",
pages = "1--1",
URL = "https://www.cg.tuwien.ac.at/research/publications/2015/Martinez-2015-TTB/",
}