Speaker: Dennis Depner
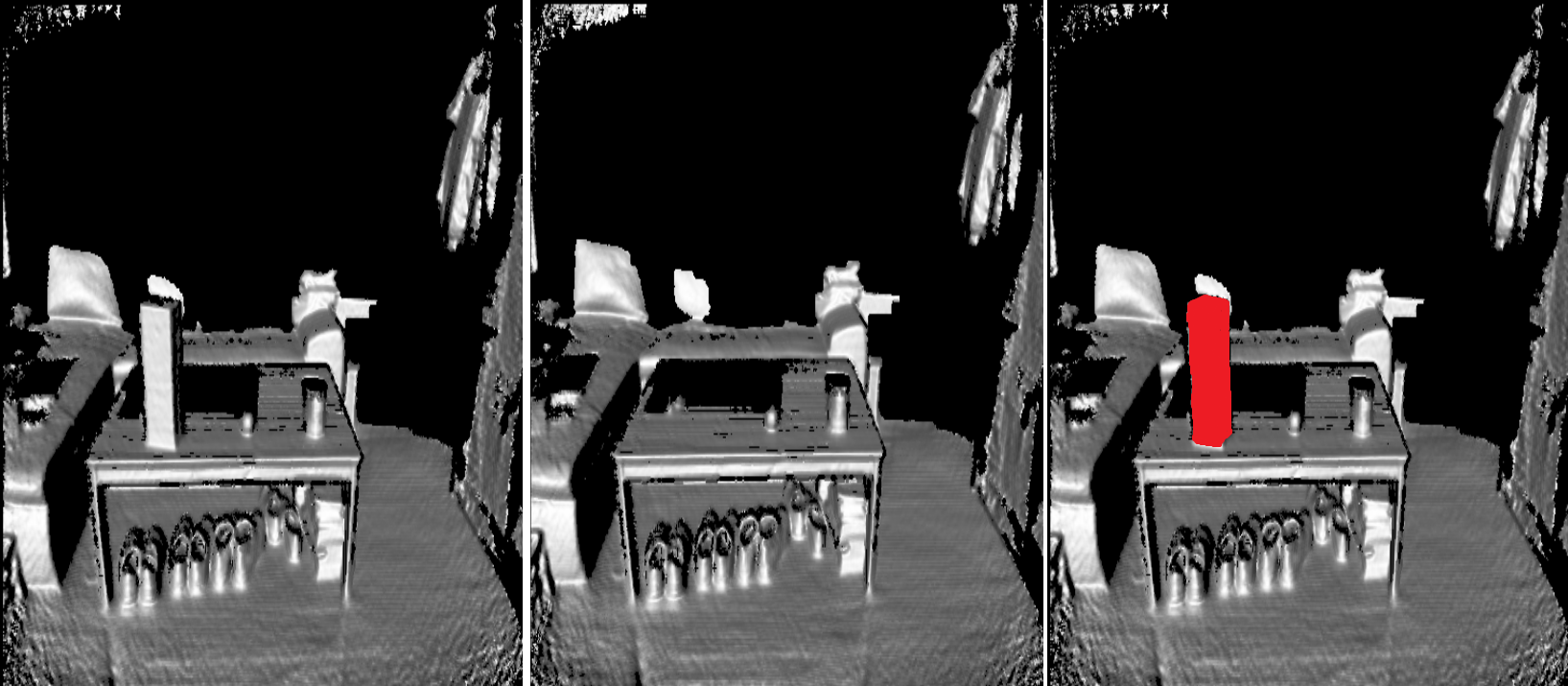
The goal is to detect changes in the environment in real-time using 3D scans and models. In order to accomplish that, a compressed data structure will be used, enabling fast change detection. The 3D voxel data used to represent the scans is categorizing each voxel as seen, unseen, or with a surface depending on the camera view. This makes it possible to group voxels into intervals, flatten the data structure, and efficiently compare them for changes. In order to take the noise properties of the scanner (e.g. Kinect Camera) into consideration and guarantee reliable results, the data will also be augmented with uncertainty from the device. This method can be used in real-world settings like offices, warehouses, and urban areas in addition to possibly being used to train deep learning algorithms.