Speaker: Simon Pointner
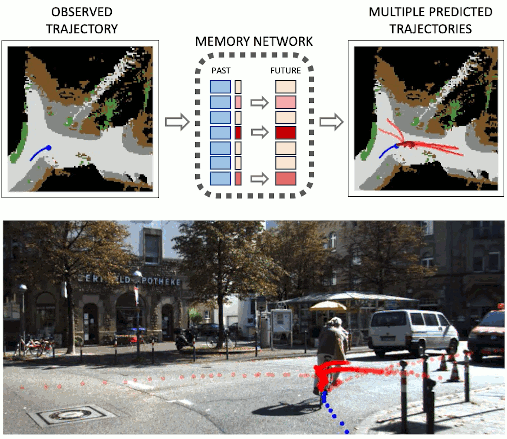
This master theses aims to develop a system that predicts road accidents for cyclists. The combination of several methods and existing implementations are proposed to be combined to achieve this goal. In the chosen approach, Lidar and IMU data are used as inputs, using which objects are detected with SFA3D (https://github.com/maudzung/SFA3D). In the following step, multiple objects are tracked (https://github.com/hailanyi/3D-Multi-Object-Tracker) to determine their trajectory. To predict the trajectory of the vehicles, the past trajectory of each vehicle is combined with a semantic segmented BEV of the lidar image. Existing algorithms use HD-Maps to improve path predictions, but as HD-Maps are not available for all areas, especially not for cyclists, the lidar image provides a context of the surroundings in this approach. In order to train a recurrent neural network (https://github.com/Marchetz/MANTRA-CVPR20) with this input, CARLA (https://carla.org/) will provide the training data for vehicle trajectory and lidar images.
Goal of this work is to verify whether with the chosen sensor input it is feasible to predict the trajectory of the road participants in advance and if this can be done early and fast enough to warn the cyclist.